Mechatronics | Systems design | Solidworks | Arduino
Robot Dog
I am currently designing a robot dog inspired by Spot (Boston Dynamics). My aim with this project is to make a small scale version more suitable for walking around households. I will 3D print all the components and use servo motors to drive limb motion.
(Feb 2024 - Present)

Leg V1
When designing a robot dog the legs are the most important module of the system. I will spend time iterating design on the leg. My focus will be on assembly, reducing components, and aesthetic design.
Mechanism in Motion
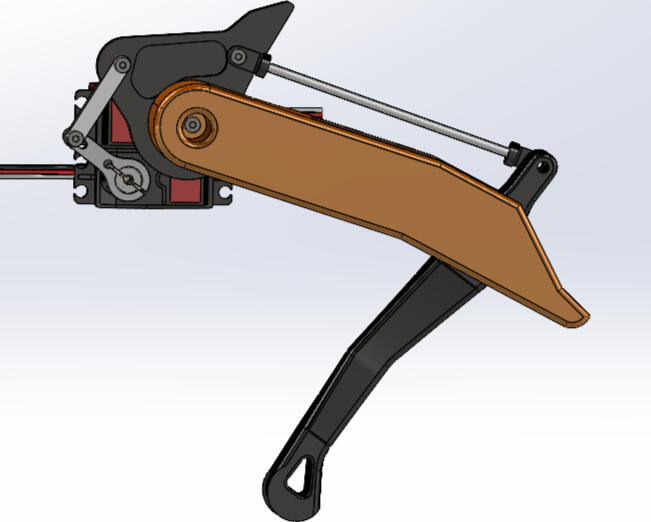
The first design was performed in effort to keep the servo motors stacked on top of each other to reduce the form factor of the servos and entirely remove the weight of the servos from the leg itself.
Leg V2
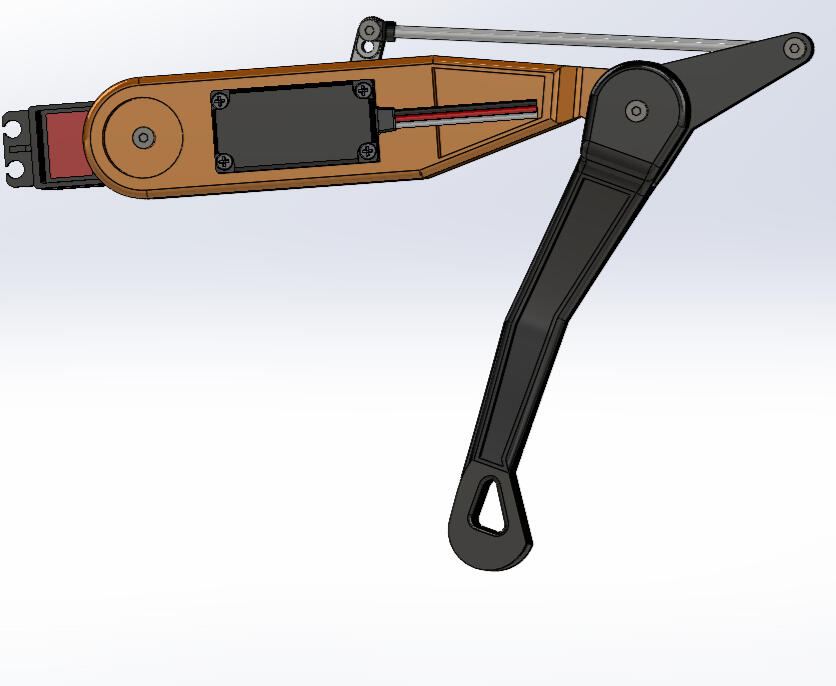
I opted to place on of the servos in the upper leg section in favor of a mechanism with fewer parts. I removed two bearings, a linkage and a servo horn from the previous design.
Knee Joint Width Reduction
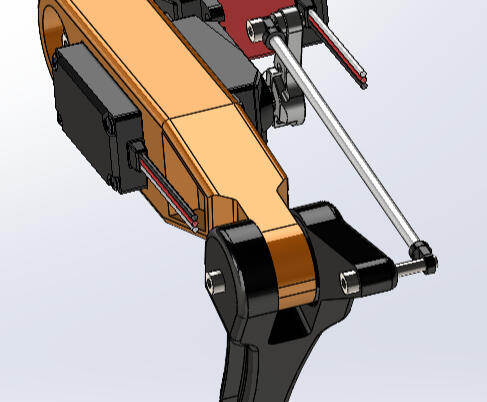
By eliminating the bearings and opting for the lower leg to house the upper leg I reduced the width of the knee joint by 10mm. Additionally, I have planned to print the leg members in two halves for easier assembly.